Смањено узорковање (обрада сигнала)
У дигиталној обради сигнала, смањено узорковање и децимација су изрази повезани са процесом поновног узорковања у вишестепеном дигиталном систему за обраду сигнала . Оба термина користе различити аутори да би описали целокупан процес, који укључује филтрирање са малим пролазима или само онај део процеса који не укључује филтрирање. [1] Када се процес сужавања прикупљањем узорака (децимација) изводи на низу узорака сигнала или друге континуиране функције, он омогућава приближавање секвенце која би се добила узорковањем сигнала нижом брзином (или густином, као у случају фотографија). Фактор децимације је обично цео број или рационални број већи од један. Овај фактор множи интервал узорковања или, еквивалентно, дели брзину узорковања. На пример, ако се звук компактног диска при 44.100 узорака по секунди смањи на фактор 5/4, добијена брзина узорка је 35.280. Системска компонента која врши децимацију назива се дециматор .
Смањивање броја према целом фактору уреди
Смањење стопе за цео фактор М може се објаснити као процес од два корака, са еквивалентном имплементацијом која је ефикаснија:
- Смањити високофреквентне компоненте сигнала помоћу дигиталног филтра за ниске фреквенције.
- Применити децимацију на филтрирани сигнал помоћу М фактора; ово значи, чувати једино сваки М-ти узорак. Нотација за ову операцију је: [2]
![{\displaystyle x[Mn]={x[n]}_{\downarrow {}M}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0c2ffd0735edb986dbdeceb1afe8240a5e253ec7)
Корак 2 самостално омогућава да високофреквентне компоненте сигнала буду погрешно протумачене од стране накнадних корисника података, што је облик изобличења који се назива отуђење (алијасинг) . Корак 1, по потреби, потискује алијасинг на прихватљив ниво. У овој се апликацији филтер назива анти-алиасинг филтер, а о његовом дизајну се говори у наставку.
Када је филтер за ублажавање под утицајем дизајна бесконачног импулсног одзива, ослања се на повратну информацију од излаза до улаза, пре другог корака. Са филтрирањeм коначног импулсног одзива, то је лако питање да израчуна само сваки М-ти излаз. Прорачун извршен децимирајућим ФИР филтером за н-ти излазни узорак је скаларни производ:
![{\displaystyle y[n]=\sum _{k=0}^{K-1}x[nM-k]\cdot h[k],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/71d3756569db36dcd0f869fb9acb8a24781041fc)
где је h[•] низ импулсни одзив, а К његова дужина. K [•] представља улазни низ који се приказује у узорку. У рачунару опште намене, после рачунања y[n], најлакши начин израчунавања y[n+1] је напредовање почетног индекса x [•] у пољу М и поновно израчунавање скаларног производа. У случају М = 2, х[•] може се обликовати као полупојасни филтер, при чему је готово половина коефицијената једнака нули и не треба их укључити у скаларне производе.
Коефицијенти одзива импулса узети у интервалима од М формирају накнадну подређеност, а ту је и М таквих накнадних фаза (фаза). Скаларни производ је збир тачака производа сваке секвенце са одговарајућим узорцима x[•] секвенце. Поред тога, због смањеног узорковања од стране М, ток x[•] узорака који су укључени у било који од производа М скалара никада није укључен у остале скаларне производе. Тако М ФИР филтери ниског реда филтрирају једну од М мултиплексираних фаза улазног тока, а М излази се сабирају. Ово гледиште нуди другачију имплементацију која би могла бити од користи у архитектури више процесора. Другим речима, улазни ток се демултиплексира и шаље кроз банку М филтера чији се резултати збрајају. Када се имплементира на тај начин, назива се полифазни филтер.
За потпуност сада спомињемо да је могућа, али мало вероватна, примена сваке фазе заменом коефицијената осталих фаза са нулама у копији h[•] матрице, обрадити оригинални x[•] низ на улазу стопу и смањите излаз за фактор М. Еквивалентност ове неефикасне методе и горе описане примене познат је као први племенити идентитет . [3]
Филтер против ублажавања уреди
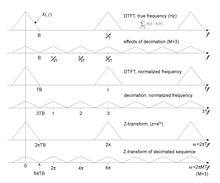
Захтеви филтера за ублажавање могу се закључити из било којег од три пара графова на слици 1. Ваља имати на уму да су сва три пара идентична, осим јединица променљивих апсциси. Горњи граф сваког пара је пример периодичне расподељене фреквенције узорковане функције, x(t), са Фуријеовом трансформацијом, Х(f). Доњи граф је нова дистрибуција која настаје када се x(t) узоркује три пута спорије, или (еквивалентно) када се оригинална секвенца узорка децимира фактором М = 3. У сва три случаја, услов који осигурава да се копије Х(f) не преклапају једнаке: где је Т интервал између узорака, 1/Т је стопа узорковања, а 1/(2 Т ) је Никвистова фреквенција . Филтер против ублажавања који може осигурати испуњење услова има фреквенцију искључивања мању од пута никвистичке фреквенције. [А]


Апсциса горњег пара графова представља дискретну временску Фуријеову трансформацију (ДТФТ), која представља Фуријеов низ периодичног сабирања Х(f):
-
(Eq.1)
![{\displaystyle \underbrace {\sum _{n=-\infty }^{\infty }\overbrace {x(nT)} ^{x[n]}\ \mathrm {e} ^{-\mathrm {i} 2\pi fnT}} _{\text{DTFT}}={\frac {1}{T}}\sum _{k=-\infty }^{\infty }X{\Bigl (}f-{\frac {k}{T}}{\Bigr )}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f0f042baeec78e1fbce45dd46dff9e0077503392)
Када се Т изражава у секундама, има јединице херца . Замена Т са МТ у горњим формулама даје ДТФТ децимираној секвенци, x[nM]:


Периодично сумирање је смањено у амплитуди и периодичности за фактор М, као што је приказано на другом графу са слике 1. Aлијасинг се догађа када се суседне копије Х(f) преклапају. Сврха филтера против ублаживања јесте да осигура да смањена периодичност не ствара преклапање.
У средњем пару графова, променљива фреквенција, је замењена нормализованом фреквенцијом, што ствара периодичност од 1 и Никвистову фреквенцију од ½. [Б] Уобичајена пракса у програмима дизајнирања филтера је претпоставити те вредности и затражити само одговарајућу фреквенцију искључивања у истим јединицама. Другим речима, фреквенција пресека се нормализује на Јединице ове количине су (секунди / узорак) × (циклуси / секунди) = циклуси / узорак.



Доњи пар графова представља Z- трансформaције оригиналних секвенци и десетковану секвенцу, ограничене на вредности сложене променљиве, z, облика Тада трансформација x[n] секвенце има облик Фуријеове серије. Поређењем са изразом 1, закључујемо:

![{\displaystyle \sum _{n=-\infty }^{\infty }x[n]\ z^{-n}=\sum _{n=-\infty }^{\infty }x(nT)\ \mathrm {e} ^{-\mathrm {i} \omega n}={\frac {1}{T}}\sum _{k=-\infty }^{\infty }\underbrace {X{\Bigl (}{\tfrac {\omega }{2\pi T}}-{\tfrac {k}{T}}{\Bigr )}} _{X{\Bigl (}{\frac {\omega -2\pi k}{2\pi T}}{\Bigr )}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1d71e4eccd0ee871efbb3cb820dc39af7f016f30)
што је приказан петим графом на слици 1. Слично томе, шести графикон приказује:
![{\displaystyle \sum _{n=-\infty }^{\infty }x[nM]\ z^{-n}=\sum _{n=-\infty }^{\infty }x(nMT)\ \mathrm {e} ^{-\mathrm {i} \omega n}={\frac {1}{MT}}\sum _{k=-\infty }^{\infty }\underbrace {X{\Bigl (}{\tfrac {\omega }{2\pi MT}}-{\tfrac {k}{MT}}{\Bigr )}} _{X{\Bigl (}{\frac {\omega -2\pi k}{2\pi MT}}{\Bigr )}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ade88cd497db12ec8aab04f56b6adfcb8be035f)
Фактор рационализације уреди
Нека М/L означава фактор децимације, где је: М, L ∈ ℤ; М>L.
- Повећати (поново узорковати) секвенцу за фактор L. То се назива прекомпоновање или интерполација.
- Десетковати фактором М
У кораку 1 потребан је филтер ниског пропусног опсега након повећања ( проширења ) брзине преноса података, а корак 2 захтева филтар ниског пропусног нивоа пре децимације. Стога се обе операције могу извести једним филтром са нижом од две резне фреквенције. За случај да је М>L случај, пресек филтера против ублажавања, циклуса по интермедијарном узорку, је нижа фреквенција.

Фактор ирационализације уреди
Технике дециминације (и генерално претварање брзине узорка) фактором Р ∈ ℝ + укључују полиномну интерполацију и Фароову структуру . [4]
Комбиноване методе десетковања(децимације) уреди
Важан фактор у развоју дигиталних антенских низова за радаре и велике МIМО системе (системи са више улаза и више излаза) је потреба за смањењем трошкова по каналу. Комбиновање поступка десетковања не само са анти-алијасинг филтером, већ и са дигиталним помицањем фреквенције и I/Q-демодулацијом такође може помоћи да се смањи овај трошак.
У једноставнијем случају децимације oртогоналног мултиплицираног фреквентног сигнала целим фактором М, [5] може се користити следећи алгоритам:
- ,
![{\displaystyle y[n]=\sum _{k=0}^{M-1}x[nM+k]\ \mathrm {e} ^{-\mathrm {i} 2\pi fkT},n=0,1,..,N}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8155ccb8f64ba7bc6557c513586fdf0483f0393a)
где је интервал између узорака сигнала и је централна носећа фреквенција ортогоналног мултиплицираног фреквентног сигнала.


Овај алгоритам представља само један филтер потпуне дискретне Фуријеове трансформације и може бити користан за десетковање узорака у аналогно-дигиталном конвертору пре дигиталног обликовања снопа у дигиталним антенским низовима.
Ако је потребно ефикасније филтрирање, али ова метода може бити модификована тако да производи :
- .
![{\displaystyle y[n]=\sum _{k=0}^{M-1}x[nM+k]h[k]\ \mathrm {e} ^{-\mathrm {i} 2\pi fkT},n=0,1,..,N}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd25e4b8eba460d026ce46c21fa8577fdfa797b9)
Види још уреди
- Процес ширења прикупљањем узорака
- Постеризација
- Конверзија стопе узорка
Напомене уреди
- ^ Realizable low-pass filters have a "skirt", where the response diminishes from near one to near zero. So in practice the cutoff frequency is placed far enough below the theoretical cutoff that the filter's skirt is contained below the theoretical cutoff.
- ^ Some programs (such as MATLAB) that design filters with real-valued coefficients use the Nyquist frequency ( ) as the normalization constant. That results in a Nyquist frequency of 1 and a periodicity of 2.

Референце уреди
- ^ Poularikas, Alexander D. (септембар 1998). Handbook of Formulas and Tables for Signal Processing (1 изд.). CRC Press. стр. 42-8. ISBN 0849385792.
- ^ Mitra, Sanjit Kumar, and Yonghong Kuo. Digital signal processing: a computer-based approach. New York: McGraw-Hill, 2006.
- ^ Strang, Gilbert; Nguyen, Truong (1. 10. 1996). Wavelets and Filter Banks (2 изд.). Wellesley,MA: Wellesley-Cambridge Press. стр. 100—101. ISBN 0961408871.
- ^ Milić, Ljiljana (2009). Multirate Filtering for Digital Signal Processing. New York: Hershey. стр. 192. ISBN 978-1-60566-178-0. „Generally, this approach is applicable when the ratio Fy/Fx is a rational, or an irrational number, and is suitable for the sampling rate increase and for the sampling rate decrease.”
- ^ Slyusar V. I. Synthesis of algorithms for measurement of range to M sources with the use of additional gating of the ADC readings.// Radioelectronics and Communications Systems. - Vol. 39. - no. 5. - 1996. - P. 36 – 40.
Додатна литература уреди
- Oppenheim, Alan V.; Schafer, Ronald W.; Buck, John R. (1999). Discrete-Time Signal Processing (2. изд.). Prentice Hall. ISBN 0-13-754920-2. Oppenheim, Alan V.; Schafer, Ronald W.; Buck, John R. (1999). Discrete-Time Signal Processing (2. изд.). Prentice Hall. ISBN 0-13-754920-2. Oppenheim, Alan V.; Schafer, Ronald W.; Buck, John R. (1999). Discrete-Time Signal Processing (2. изд.). Prentice Hall. ISBN 0-13-754920-2.
- Proakis, John G. (2000). Digital Signal Processing: Principles, Algorithms and Applications (3. изд.). India: Prentice-Hall. ISBN 8120311299. Proakis, John G. (2000). Digital Signal Processing: Principles, Algorithms and Applications (3. изд.). India: Prentice-Hall. ISBN 8120311299. Proakis, John G. (2000). Digital Signal Processing: Principles, Algorithms and Applications (3. изд.). India: Prentice-Hall. ISBN 8120311299.
- Lyons, Richard (2001). Understanding Digital Signal Processing. Prentice Hall. стр. 304. ISBN 0-201-63467-8. „Decreasing the sampling rate is known as decimation.” Lyons, Richard (2001). Understanding Digital Signal Processing. Prentice Hall. стр. 304. ISBN 0-201-63467-8. „Decreasing the sampling rate is known as decimation.” Lyons, Richard (2001). Understanding Digital Signal Processing. Prentice Hall. стр. 304. ISBN 0-201-63467-8. „Decreasing the sampling rate is known as decimation.”
- Antoniou, Andreas (2006). Digital Signal Processing. McGraw-Hill. стр. 830. ISBN 0-07-145424-1. „Decimators can be used to reduce the sampling frequency, whereas interpolators can be used to increase it.” Antoniou, Andreas (2006). Digital Signal Processing. McGraw-Hill. стр. 830. ISBN 0-07-145424-1. „Decimators can be used to reduce the sampling frequency, whereas interpolators can be used to increase it.” Antoniou, Andreas (2006). Digital Signal Processing. McGraw-Hill. стр. 830. ISBN 0-07-145424-1. „Decimators can be used to reduce the sampling frequency, whereas interpolators can be used to increase it.”
- Milic, Ljiljana (2009). Multirate Filtering for Digital Signal Processing. New York: Hershey. стр. 35. ISBN 978-1-60566-178-0. „Sampling rate conversion systems are used to change the sampling rate of a signal. The process of sampling rate decrease is called decimation, and the process of sampling rate increase is called interpolation.” Milic, Ljiljana (2009). Multirate Filtering for Digital Signal Processing. New York: Hershey. стр. 35. ISBN 978-1-60566-178-0. „Sampling rate conversion systems are used to change the sampling rate of a signal. The process of sampling rate decrease is called decimation, and the process of sampling rate increase is called interpolation.” Milic, Ljiljana (2009). Multirate Filtering for Digital Signal Processing. New York: Hershey. стр. 35. ISBN 978-1-60566-178-0. „Sampling rate conversion systems are used to change the sampling rate of a signal. The process of sampling rate decrease is called decimation, and the process of sampling rate increase is called interpolation.”
- Harris, Frederic J. (24. 5. 2004). „2.2”. Multirate Signal Processing for Communication Systems. Upper Saddle River, NJ: Prentice Hall PTR. стр. 20—21. ISBN 0131465112. „The process of down sampling can be visualized as a two-step progression indicated in Figure 2.9. The process starts as an input series x(n) that is processed by a filter h(n) to obtain the output sequence y(n) with reduced bandwidth. The sample rate of the output sequence is then reduced Q-to-1 to a rate commensurate with the reduced signal bandwidth.” Harris, Frederic J. (24. 5. 2004). „2.2”. Multirate Signal Processing for Communication Systems. Upper Saddle River, NJ: Prentice Hall PTR. стр. 20—21. ISBN 0131465112. „The process of down sampling can be visualized as a two-step progression indicated in Figure 2.9. The process starts as an input series x(n) that is processed by a filter h(n) to obtain the output sequence y(n) with reduced bandwidth. The sample rate of the output sequence is then reduced Q-to-1 to a rate commensurate with the reduced signal bandwidth.” Harris, Frederic J. (24. 5. 2004). „2.2”. Multirate Signal Processing for Communication Systems. Upper Saddle River, NJ: Prentice Hall PTR. стр. 20—21. ISBN 0131465112. „The process of down sampling can be visualized as a two-step progression indicated in Figure 2.9. The process starts as an input series x(n) that is processed by a filter h(n) to obtain the output sequence y(n) with reduced bandwidth. The sample rate of the output sequence is then reduced Q-to-1 to a rate commensurate with the reduced signal bandwidth.”
- Tan, Li (21. 4. 2008). „Upsampling and downsampling”. eetimes.com. EE Times. Приступљено 10. 4. 2017. „The process of reducing a sampling rate by an integer factor is referred to as downsampling of a data sequence. We also refer to downsampling as decimation. The term decimation used for the downsampling process has been accepted and used in many textbooks and fields.”
- Т. Шилхер. РФ апликације у дигиталној обради сигнала // "Дигитална обрада сигнала". Зборник радова, Школа убрзања ЦЕРН-а, Сигтуна, Шведска, 31. мај-9. јун 2007. - Женева, Швајцарска: ЦЕРН (2008). - П. 258. - ДОИ: 10.5170 / ЦЕРН-2008-003. [1]
- Слиусар ИИ, Слиусар ВИ, Волосхко СВ, Смолиар ВГ Оптички приступ следеће генерације заснован на Н-ОФДМ са децимацијом. Наука и технологија (ПИЦ С & Т'2016) “. - Харков. - 3. - 6. октобар 2016. [2]
- Саска Линдфорс, Аарно Парссинен, Кари АИ Халонен. 3-В ЦМОС поднасвајач ЦМОС децимације. // ИЕЕЕ трансакције на склоповима и системима - Вол. 52, бр. 2, фебруар 2005. - П. 110.