Београдска школа роботике
Београдска школа роботике односи се на групу истраживача у области роботике из различитих институција окупљених у Београду. Њиховим радом Београд је препознат као колевка модерне хуманоидне роботике. Лабораторија за роботику Института Михајло Пупин основана је 1967. године. У Лабораторији је радило преко 30 истраживача који су били махом машински и електро инжењери, као и дипломирани математичари са Природноматематичког факултета. Раду лабораторије највише је допринео професор Миомир Вукобратовић.
Лабораторија за роботику уреди
Оснивање уреди
Лабораторија за роботику Института Михајло Пупин основана је 1967. године у Београду. Првобитно је основана као Одељење за биокибернетику у оквиру Лабораторије за аутоматику. У оквиру ове лабораторије професор Вукобратовић је заједно са др Јуричићем наставио проучавање динамике и кинематике великих механичких система углавном антропоморфног типа. Значајне резултате у области активних механизама намењених кретању тј. механизама са погонским зглобовима доноси њихов заједнички теоријски рад. Рад под називом Допринос синтези бипедалне локомоције Вукобратовић је први пут представио у Москви 1968. године у оквиру IFAC 12 симпозијума на тему Технички и биолошки проблеми контроле, Јереван. Рад је штампан наредне године у зборнику (енгл. Transactions on Biomedical Engineering). Ово је уједно био и први штампани научни рад у свету у оквиру области моделовања локомоционе динамике. Пола века касније овај пионирски рад постао је најпродуктивнији и најатрактивнији предмет истраживања у области хуманоидне роботике. Њихов рад је најавио формирање и издвајање Роботике као посебне научне дисциплине и професије.[1]

Пре него што је Лабораторија основана, проучавање двоножног хода је избегавано због проблема, укључујући проблем баланса, односно стабилности бипедалног хода. Са друге стране, у Лабораторији се интензивно радило на матаматичком моделовању антропоморфних активних механизама, проучавању стабилности и синтези бипедалног кретања. Вукобратовић је први у свету успешно објаснио и представио вештину људског двоножног кретања на основу Њутнове механике и динамике. Представио је једноставан модел двоножног кретања са седам степени слободе и пет зглобова. Вукобратовић је концепт у својим радовима у периоду између 1970. и 1972. године назвао Теорија тачке нула момента (енгл. ZMP, Zero-Moment Point Theory) којом је решен проблем начина на који бипедални роботи могу да ходају и одржавају равнотежу.[1]
Теоријски подухвати истраживача Лабораторије и Београдске школе роботике дали су резултате и примену у рехабилитационој роботици. У Лабораторији су започети пионирски радови на развоју стварању претеча ортоза попут прве протетичке шаке, активних егзоскелета, индустријског робота, потколене протезе, итд. Године 1968. започет је рад на конструисању једноставних егзоскелета.

Колики је био значај теоријског, али и практичног рада сведочи и податак да је професор Вукобратовић од 1970. године позван више од 145 пута од стране важних едукативних института и истраживача из Кине, Русије, САД, Италије, Немачке, Енглеске, Пољске, са циљем да одржи предавања и прикаже актуелне резултате Лабораторије, као и рад Београдске школе роботике.[1]
Значајни резултати остварени су захваљујући сарадњи са научницима из Америке. Заједно су радили на пројекту под називом Теоријска студија бипедалног покрета код животиња и машина, у периоду од 1971. до 1976. године. Међу научницима био је и Роберт Макги са Државног универзитета у Охају, САД. Рад је 1976. године позитивно оцењен од стране представника Националне научне фондације. Том приликом су истакли да је професор Вукобратовић истакнути експерт на овом пољу и да је рад привукао пажњу јапанским научницима.[1]
Смањеним интензитетом настављен је рад у области рехабилитационе роботике у периоду од 1978. до 1982. године. Године 1978. настало је активно одело, полумеки ортозни уређај за дистрофичаре. Пројекат активног одела направљен је уз финансијску помоћ америчке организације SRS (Сервис за социјалну рехабилитацију) и NSF (Национална научна фондација) као део сарадње Америке и Југославије. Године 1982. настао је нови модел активног ортоичког уређаја за ниже екстремитете дистрофичара, први на свету као и прва у свету егзоскелетна електронска рука за дистрофичаре. Оба патента је купио Тексашки центар за рехабилитацију у Хјустону. Помоћу патената омогућена је активна рехабилитација помоћу робота егзоскелета.[1]
Индустријска роботика уреди

Истраживачки рад се од 1975. године шири у другим правцима. Лабораторија постаје место практичног и теоријског рада на пољу манипулације у домену индустријске роботике. Теоријски допринос је публикован у најпрестижнијим часописима и публикацијама како у Америци, тако и у публикацијама Совјетске (Руске) академије наука. Развој првог у свету индустријског робота антропоморфне форме започео је 1976. године. Први робот који је примењен у домаћој индустрији, фабрици Телеоптик, на пословима монтаже термостата за аутомобиле, настао је 1978. године (UMS 1) и био је покретан помоћу електромеханичког мотора. Наредних година је развијено неколико успешних прототипова индустријских робота са софтвером попутː UMS2-1980, UMS3-1981 итд. Прототипови индустријских робота направљени су у сарадњи са водећим југословенским предузећима.[2]
Активност тима Лабораторије на челу са професором Вукобратовићем бележила је достигнућа и успехе у различитим сегментима од динамичког управљања локомоторним роботима, аутоматског добијања динамичког модела за просторне активне механизме, увођења управљања негативном повратном спрегом у роботику, до увођења практичних тестова стабилности у управљању за роботске механизме, новог приступа моделирању итд. Током осамдесетих година интензивно је рађено на различитим задацима попут динамичког и кинематичког моделовања роботских система помоћу рачунара, адаптивног управљања роботима, вишеструке процесорске обраде модела робота итд. Важни резултати постигнути су и током рада на микропроцесорским системима. Посебно се истиче мултипроцесорски универзални роботски контролер високих перформанси базиран на Intel 8086 процесору. Развијен је и тестиран 1988. године, а један примерак је испоручен и Роботском центру у Москви.[2]
Едукативна роботика уреди
Осамдесетих година 20. века настала је серија едукативних робота са циљем да се ова релативно нова грана науке промовише међу студентима. Развијени су прототипови едукативних робота попут модела Robed 01, Robed 02 и Robed 03 који су имали напредни едукативни софтвер и RC контролере. Роботи су коришћени на Универзитетима широм Југославије, али и ван ње, као средство за модерну едукацију у роботици и индустрији. Научни и истраживачки доприноси били су подржани финансијски од стране Министарства за науку и технологију Републике Србије, Центра за социјалну рехабилитацију САД, UNIDO-а, ЕУРЕКА програма итд.[3]
Период од 1992. до 2001. године уреди
Током деведесетих година Уједињене нације су увеле економске санкције према СР Југославији што је јако погодило и рад у Лабораторији. Финансије су ослабиле, а такође су истакнути научници и сарадници отишли у иностранство што је додатно допринело отежаном раду. Лабораторија је тада трансформисана у ИМП Центар за роботику у оквиру Института Михајло Пупин.[3]
Нови миленијум уреди

Почетком 21. века објављени су значајни резултати из области фази (енгл. Fuzzy) логике, неуронских мрежа, моделовања и контроле роботских система и бипедалног кретања. Развијено је и неколико софтверских пакета попут CAD, CADMAN, MANSIM, SIM, AER, FTS итд. Поменути софтверски пакети нашли су примену у роботским одељењима и другим истраживачким институцијама у Шпанији, Русији, Немачкој, Канади, Кини, САД итд. Центар за роботику се интензивно бавио математичким моделовањем кинематичких и динамичких роботских механизама, дизајнирањем механичких роботских структура, формирањем концепта варијабилне геометрије. Данас је у понуди прозводња у области информационо-комуникационих технологија, израда роботских система на основу знања из области машинства, роботике и електронике, аутоматског управљања рачунарске технике, развоја и употребе роботских система током ноћног и дневног надзора, узимања узорака са терена, спасилачких задатака, за потребе филмске и сценске индустрије, развој уређаја и помагала у клиничкој пракси итд.[3]
Професор Вукобратовић је руководио Лабораторијом све до 2008. године. Наследио га је др Александар Родић који је и данас њен руководилац.[3]
Галерија уреди
-
 Индустријски робот UMS из 1978. године, данас се налази у Музеју науке и технике Београд
Индустријски робот UMS из 1978. године, данас се налази у Музеју науке и технике Београд -
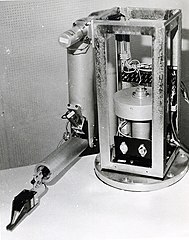
 Ортотичка рука, 1982. година
Ортотичка рука, 1982. година -
 Промона 2, индустријски прототип активне потколене протезе, 1990. година
Промона 2, индустријски прототип активне потколене протезе, 1990. година -
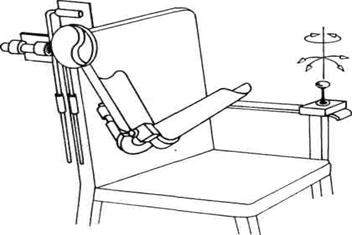 Шема ортотичке руке
Шема ортотичке руке




Види још уреди
Референце уреди
- ^ а б в г д Станић 2017, стр. 6-16
- ^ а б Станић 2017, стр. 16-18
- ^ а б в г Станић 2017, стр. 19-25
Литература уреди
- Станић Иван (2017), Рођење хуманоидне роботике- каталог изложбе. БеоградːМузеј науке и технике Београд
Спољашње везе уреди
- Рачунарски факултет: Историјски развој роботике Архивирано на сајту Wayback Machine (22. фебруар 2019)
- Музеј науке и технике Београд Архивирано на сајту Wayback Machine (4. фебруар 2019)
- Институт Михајло Пупин