Марсова научна лабораторија (енгл.Mars Science Laboratory), или скраћено МНЛ, роботска је сонда Националне ваздухопловне и свемирске администрације. Намена јој је да се помоћу ње дође до сазнања о постојању трагова и услова за живот на Марсу. Главна компонента система је ровер назван Кјуриосити (Радозналост, енгл.Curiosity).[1]Ровер (други назив планетарни ровер) је роботизовано возило за истраживање свемира пројектовано за кретање по површини планете или неког другог небеског тела. Може се користити за транспорт људске посаде (амерички астронаути су их користили током мисија на Месец), или се аутономно кретати без слања команди са Земље. Обично их достављају летелице, које се спуштају према површини планете малом брзином (мекано слетање). Ове летелице се називају лендери.
Лансирање се догодило 26. новембра2011. у 15.02.00.211 UTC, а слетање на површину планете, у Гејл кратер, 6. августа2012. године у 05.17.57 UTC. Уз помоћ нових принципа слетања, ровер се спустио на Марс, већом прецизношћу од досадашњих сонди. Примаран циљ ровера је да покуша да открије да ли је тренутно или у прошлости Марс био погодан за развој живота, мада неће трагати за неким одређеним његовим облицима. Уместо тога, ровер ће хемијски анализирати узорке на различите начине, између осталог скупљати узорке тла, бушити стене и користити ласер и пратеће сензоре.[2]
Ровер Кјуриосити је скоро пет пута већи од ровера Спирит и Опортјунити, а носи и обимнију опрему, десет пута веће масе, у односу на претходне. Ровер је лансиран ракетомАтлас V-541 и након свог пута до планете и слетања на њену површину би требало да врши научна истраживања током 687 земаљских дана (1 година на Марсу), и да пређе 5-20 km.[3]
Ровер Кјуриосити је дуг 3 m и има масу 900 kg, укључујући 80 kg опреме за научна мерења и истраживања.[6] Приближан је димензијама Мини Купер аутомобила, много је већи од претходних ровера Спирит и Опортјунити који су дужине 1,5 m, масе 174 kg и носе 6,8 kg опреме за научна истраживања.
Брзина:
Када се спусти на површину, ровер ће моћи да пређе преко препрека висине 75 cm. Максимална брзина кретања је процењена на 90 m/h, аутоматском навигацијом. Међутим, просечна брзина кретања ће вероватно бити око 30 m/h, у зависности од снаге напајања, конфигурације терена, налегања на тло и видљивости. Од МНЛ се очекује да пређе до 19 km током своје двогодишње мисије.[7]
Извор напајања:
Кјуриосити се напаја радиоизотопним термоелектричним генератором, као и Викинг 1 и Викинг 2 лендери 1976. године.[8][9] Системи радиоизотопног напајања су генератори који производе електричну енергију из природног распада плутонијума-238 који је нефисиони изотоп плутонијума. Топлота која се ослобађа природним распадом овог изотопа се претвара у електричну енергију чиме се обезбеђује константно напајање током свих годишњих доба као и током дана и ноћи. Вишак топлоте се може одвести цевима за загревање система чиме се ослобађа електрична енергија за операцију ровера и инструмената. РТГ-ови овог ровера су напуњени са 4,8 kg плутонијум-238 диоксида који је обезбедио Одсек за енергију САД, спакован у 32 палете величине маршмелоа.
Генератори уграђени на Кјуриосити су најновија генерација РТГ генератора које је конструисао Боинг, названих ”Мултимисиони радиоизотопни термоелектрични генератори“ или ММРТГ.[10] Базирани су на класичној РТГ технологији, представљају флексибилнију и компактнију опцију, пројектовану да обезбеди 125 вати електричне енергије и 2.000 вати топлотне енергије на почетку мисије. ММРТГ производе све мање енергије јер се троши плутонијумски извор; након 14 година (што представља минимално трајање плутонијумског горива) електрична енергија опада на 100 вати.[11] Марсова научна лабораторија ће производити 2,5 киловат часа на дан, много више од претходних ровера са соларним напајањем, који производе 0,6 киловат часова.
Приказ склопова MMRTG.
Систем одвођења топлоте:
Температуре, у подручју слетања ровера, варирају од +30 до -127 °C. Стога систем за одвођење топлоте користи течност која се спроводи кроз цеви дужине 60 m, које су распоређене кроз цео ровер, да би се осетљиве компоненте држале на оптималној температури.[12] Друге методе загревања унутрашњих компоненти укључују коришћење топлоте која се производи у роверу и добијеног вишка од ММРТГ-а. Систем такође поседује могућност да хлади компоненте у случају да је то потребно.
Рачунари:
Два идентична рачунара унутар ровера, сачињавају његов информатички систем (RCE), који садржи заштићену меморију од високе радијације из свемира. Сваки меморијски модул има 256 KBEEPROM, 256 MBDRAM и 2 GBфлеш меморије.[13] У поређењу, Марс експлорејшн ровери имају 3 MB EEPROM, 128 MB DRAM и 256 MB флеш меморије. RCE рачунари користе процесорRAD750, који је наследник процесора RAD6000, коришћеног код МЕР. RAD750 је способан за 400 милиона операција у секунди, док је RAD6000 способан за 35 МИПС.[14][15][16] Од два рачунара у роверу, један служи као резерва, у случају да закаже примарни.
Ровер поседује унутрашњу мерну јединицу (енгл.Internal measurement unit – IMU) која обезбеђује податке о положају ровера у односу на 3 осе, а ти подаци се користе при навигацији и управљању ровером. Рачунари су у константном режиму надгледања, ради одржања ровера у непрекидном оперативном стању. Активности попут фотографисања, управљања и рада опреме, извршавају се на основу командних сигнала, који се шаљу са Земље.
Комуникација:
Кјуриосити има два начина комуникације — X таласни транспондер који има могућност да директно комуницира са Земљом, и UHF радио за комуникацију са орбитерима у орбити око Марса. Комуникација са орбитерима ће бити главно средство слања података, пошто орбитери имају јаче напајање и веће антене.[17] У тренутку слетања, сигналу ће бити потребно 13 минута и 46 секунди да стигне до Земље.[18]
Систем кретања:
Као и претходни Марс експлорејшн ровери и Марс патфајндер, Кјуриосити је опремљен са 6 точкова с посебним вешањем. Систем вешања ће такође бити употребљен као стајни органи при слетању. Точкови ће бити значајно већи него ког претходних ровера. На сваком точку је остављен посебан шаблон који побољшава налегање, али такође оставља отиске на песковитој површини Марса. Ови отисци служе као „запис“ камерама за прорачун пређеног пута. „Запис“ је написан Морзеовом азбуком и представља слова ЈПЛ (·--- ·--· ·-··).[19]
На слици се виде типови три генерације ровера који су послати на Марс.
Стубна камера (енгл.MastCam): овај инструмент омогућава снимање фотографија у видљивом и другим спектрима помоћу две камере.[26] Ове камере снимају фотографије у боји резолуције 1.600 x 1.200 пиксела, и компресован видео високе дефиниције (10 фрејмова у секунди) резолуције 720p (1.280 x 720). Једна камера ће бити камера средњег угла (Medium Angle Camera — MAC) жижне даљине 34 mm, видног поља 15° и производи размеру од 22 cm по пикселу са удаљености од 1 km. Друга камера ће бити камера уског угла (Narrow Angle Camera — NAC) жижне даљине 100 mm, видног поља 15° и производи размеру од 7,4 cm по пикселу са удаљености од 1 km.[26] Малин корпорација је такође развила пар ових камера са посебним објективом који поседује могућност зумирања,[27] али оне нису укључене у коначан пројекат јер њихово испитивање није могло да се заврши у року до лансирања према Марсу 2011. године.[28] Свака камера ће имати 8 GB флеш меморије што омогућава складиштење преко 5.500 слика.[26] Камере такође поседују аутофокус што им омогућава да фокусирају објекте удаљене од 2,1 m до бесконачности.[29]
Камера роботске руке — MAHLI.
У поређењу са камерама Марс експлорејшн ровера (црно-беле панорамске камере резолуције 1.200 x 1.200 пиксела) MAC MastCam камера има 1,25x већу просторну резолуцију, а NAC MastCam 3,67x већу просторну резолуцију.[29]
Камера роботске руке (енгл.Mars Hand Lens Imager) — MAHLI: овај уређај се састоји од камере монтиране на роботској руци ровера која се користи за микроскопско фотографисање камења и земљишта. Камера снима фотографије у боји резолуције 1.600 x 1.200 пиксела, при чему резолуција по пискелу достиже 14,5 микрометара. MAHLI има жижну даљину од 18,3 mm до 21,3 mm и видно поље од 33,8 до 38,5°.[26] Камера поседује бело и ултраљубичасто LED осветљење за сликање у мраку или за сликање флуоресценције. Ту је и могућност механичког фокусирања од бесконачности па све до удаљености од свега неколико милиметара.[26]
Камера за сликање при слетању (енгл.MSL Mars Descent Imager) — MARDI:
Камера за сликање при слетању — MARDI.
Током слетања на површину Марса MARDI ће константно фотографисати окружење, при чему ће слике бити 1.600 x 1.200 пиксела и експозицијом од 1,3 милисекунди. Прикупљање фотографија почиње на висини од 3,7 km па све до 5 m изнад површине, сваке секунде се прикупи 5 слика а целокупан процес ће трајати око 2 минута.[30][31] Величина пиксела ће бити 1,5 m са висине од 2 km па све до 1,5 mm са висине 2 m, док је видно поље 90°. MARDI има унутрашњу меморију величине 8 GB што омогућава складиштење 4.000 фотографија. Ове фотогафије ће помоћи тиму ровера да се упозна са окружењем и конфигурацијом терена места слетања што ће помоћи при операцијама и научним истраживањима.[30]
Чини систем, који се састоји од два уређаја за даљинско истраживање (без физичког контакта). Први је ласерски индукована спектроскопија (Laser-induced breakdown spectroscopy — LIBS) која је по први пут употребљена на некој свемирској мисији, а други је даљинска микро-камера (Remote micro-imager RMI).[32][33] LIBS је уређај који може ласерским снопом да осветли стену, или неки део терена са удаљености од 7 m при чему део тог материјала испарава и затим се
Уметниково виђење — ровер користи ChemCam инструмент.
спектралном анализом састава гасова утврђују његова својства. Таласна дужина ласерског снопа је 1.067 nm, са пулсом од 5 наносекунди. Детекција лопте светлеће плазме ће бити вршена у видљивом као и у ултраљубичастом и инфрацрвеном спектру, таласне дужине 240 nm и 800 nm.[34] Користећи исту оптику RMI обезбеђује контекстне слике места која анализира LIBS. RMI може да разазна објекте величине 1 mm са удаљености од 10 m и са те удаљености има видно поље 20 cm.[34] ChemCam инструмент је развила Национална лабораторија у Лос Аламосу у сарадњи са француском CESR лабораторијом.[34][35][36] НАСА је утрошила 10 милиона долара на развој ChemCam уређаја, укључујући и око 1,5 милиона долара прекорачења дефинисаног буџета, што је око 0,05% укупног буџета целе мисије. Француска свемирска агенција доставила је прототип стуба са уређајем, лабораторији у Лос Аламосу, а затим и коначан модел Лабораторији за млазни погон у фебруару2008.[37]
Овај спектрометар ће озрачити уређаје алфа-честицама и мапирати спектар Х-зрака који се притом одбију назад да би се утврдио елементарни састав узорка.
APXS је варијанта рендген емисије индуковане честицама (Particle-induced X-ray emission — PIXE) која је претходно коришћена код мисија Марс патфајндер и Марс експлорејшон ровер. Инструмент је дизајнирала и направила Канадска свемирска агенција.[38]
Хемија и минералогија (енгл.Chemistry and Mineralogy) — ChemMin:
Уређај рендгенске структурне анализе и рендгенске флуоресценције[39] и један је од четири спектрометра која има ровер. Он ће идентификовати и одредити колика је распрострањеност минерала на Марсу. Конструисали су га Истраживачки центар Ејмс и Лабораторија за млазни погон. Ровер ће бушењем ситнити стене и резултујући уситњени материјал испитати уз помоћ овог инструмента. Сноп рендгенских зрака се усмерава кроз овај прах тако да унутрашња кристална структура минерала скреће сноп и ствара образац рендгенских зрака. Сви минерали скрећу рендгенске зраке на специфичан начин и стварају уникатне обрасце (попут отиска прста код човека), тако да научници могу да одреде структуру минерала са којима ће се ровер сусретати.[39]
Анализа узорака на Марсу (енгл.Sample analysis at Mars) — SAM:
Овај скуп уређаја анализира органска једињења и гасове како из саме атмосфере тако и из чврстих узорака.[40][41] Развијен је у партнерству Годард спејс флајт центра, француске атмосферске лабораторије и неколико других коопераната.[40][42] SAM се састоји од три посебна инструмента:
SAM пакет инструмената.
Квадруполни масени спектрометар (енгл.Quadrupole Mass Spectrometer) — QMS: ће детектовати гасове из атмосфере или оне који се ослобађају из узорака приликом њиховог загревања.[40]
Гасни хроматограф (енгл.Gas Chromatograph) — GC: ће се користити за издвајање специфичних гасова из сложених једињења у молекулске компоненте са опсегом масе 2–235 u.[40]
Детектор за процену радијације (енгл.Radiation assessment detector) — RAD:
Овај уређај је први укључен, у оквиру опреме МНЛ. Током пута ка Марсу и за време истраживања по површини, овај уређај ће карактерисати широк спектар радијационих окружења кроз која ће ровер проћи. Оваква мерења никада до сада нису обављена из унутрашњости летелице и њихов главни циљ је да утврди ниво заштите који ће бити потребан људским истраживачима. Развијен је у кооперацији југозападног истраживачког института (SwRI) из Сан Антонија и универзитета у Килу у Немачкој.[44]
Динамички албедо неутрона (енгл.Dynamic albedo of neutrons) — DAN:
Пулсни извор и детектор неутрона за мерење водоника и воде или леда на површини или одмах испод површине Марса. Уређај је обезбедила федерална космичка агенцијаРусије.[45]
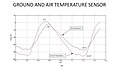
Метеоролошки пакет и сензор ултраљубичастог зрачења који је обезбедило шпанско министарство образовања и науке у сарадњи са финским метеоролошким институтом.[46][47] Биће постављен на стуб камере и мериће атмосферски притисак, влажност ваздуха, струјање и јачину ветра, температуру тла и ваздуха као и ниво ултраљубичастог зрачења. Сви сензори су груписани око три елемента: две гране прикачене на стуб за даљинско надгледање (Remote Sensing Mast — RSM), склопа ултраљубичастог сензора (Ultraviolet Sensor — UVS) који се налази на горњој страни ровера и јединице за контролу инструмената (Instrument Control Unit — ICU) која се налази унутар ровера. REMS ће пружити нове трагове о свеопштој циркулацији Марса, локализованим временским системима, локалним хидролошким циклусима, штетности ултраљубичастог зрачења и могућности насељења испод површине на основу интеракције између атмосфере и земљишта.[46]
Опрема за улазак у атмосферу и слетање (енгл.MSL entry descent and landing instrumentation) — MEDLI:
Главни задатак MEDLI пројекта је да надгледа аеротермална окружења, потповршинске промене материјала топлотног штита, оријентацију ровера и густину атмосфере током уласка кроз атмосферу све до одвајања топлотног штита и ослобађања ровера.[48][49] MEDLI пакет са уређајима ће бити инсталиран унутар топлотног штита улазног возила. Прикупљени подаци ће олакшати рад будућих мисија тиме што ће обезбедити податке о атмосфери за потврду модела Марсове атмосфере и за одређивање тачних спецификација при планирању мисија.
Шематски приказ инструмената ровера.
MEDLI се састоји од три главна подсистема: MEDLI интегрисани утикачи сензора (MEDLI Integrated Sensor Plugs — MISP), систем података при уласку у атмосферу Марса (Mars Entry Atmospheric Data System — MEADS) и електроника за подршку система (Sensor Support Electronics — SSE).
Камере за избегавање препрека (енгл.Hazard avoidance cameras) — Hazcams:
МНЛ ће користити два пара црно-белих навигационих камера постављених лево и десно на предњој и на задњој страни ровера.[50][51] Оне се користе за аутоматско избегавање препрека при вожњи ровера и за позиционирање роботске руке при теренским испитивањима. Камере ће сликати у видљивом спектру и тако склапати 3D стереоскопске фотографије. Камере имају видно поље од 120° и могу да мапирају терен, 3 метра испред ровера. Ове фотографије служе као сигурносна мера да се ровер не би случајно сударио са неком препреком, и ради у тандему са софтвером који омогућује роверу да сам доноси поуздане одлуке.[50]
МНЛ ће користити пар црно-белих навигационих камера постављених на стуб за подршку кретању по терену.[50][51] Камере ће сликати у видљивом спектру и тако склапати 3D стереоскопске фотографије. Камере имају видно поље од 45°.[51]
Гејл кратер са елипсом која означава место слетања. Стрелице показују две локације које су од великог интереса за научнике (дубоки кањони).[53]
Главно питање при избору оптималног места за слетање је идентификација специфичног геолошког окружења (или скупа окружења) која би могла да подрже микробиолошки живот. Да би се смањио ризик од неуспеха и осигурала највећа шанса за остваривање научних циљева, нагласак се ставља на места која имају велики број научних циљева. Сходно томе, место слетања са морфолошким и минералошким доказима о води у прошлости има предност при избору у односу на места без ових карактеристика. Места чија спектрална анализа указује на хидриране минерале, минерале глине и соли сулфата такође указују на богато налазиште. Хематит, оксиди гвожђа, минерали сулфата и силицијума, силицијум диоксид, а можда и хлоридни минерали спадају у подлоге које су погодне за очување фосила. Сви они су пронађени при ископавањима фосила на Земљи.[54] Тежак терен је најбољи кандидат за налажење доказа о условима за живот, тако да инжењери морају бити сигурни да ровер може да им приступи и креће се по њима.
Због техничких ограничења место слетања морало је да буде удаљено највише 45° од Марсовог екватора, и да има висину мању од 1 km у односу на референтну нулту тачку.[55] На првој радионици за избор места слетања одабране су 33 потенцијалне локације.[56] До друге радионице која је одржана крајем 2007. године, број локација се попео на 50,[57] али се до завршетка ове радионице овај број смањио на шест.[58][59][60] У новембру 2008. године, на трећој радионици лидери пројекта су свели избор на четири потенцијалне локације:[61][62][63]
Места која би ровер могао да истражи. Приказана елипса је димензија 20 x 25 km.
На основу рангирања места за слетање које су урадили истражитељи пројекта, администратори агенције НАСА одабрали су Гејл кратер за место слетања ровера.[70][71][72] Унутар Гејл кратера налази се планина састављена од слојевитог материјала која се уздиже 5 km избад пода кратера коју ће Кјуриосити истражити. Место слетања је раван предео одмах поред планине која се уздиже у средини. Ровер би требало да се приземљи унутар елипсе димензија 20 x 25 km унутар кратера чији је пречник 154 km.
На месту слетања ровера наталожен је материјал који се спрао са зидова кратера који ће научницима пружити шансу да истраже стене које чине темељ (основу) ове области. Елипса такође обухвата веома густ и светло обојен тип стена који до сада није истражен на површини планете. Постоји могућност да су те стене наслаге из прастарих слатководних мочвара и оне ће бити прва мета у потрази ровера за органским молекулима.[73]
Међутим, област од највећег научног интереса за ровер је у подножју планине, одмах изван елипсе слетања, преко поља тамних дина. На овој локацији инструменти на орбитерима су открили присуство минерала глине и соли сулфата.[74] Научници који се баве истраживањем Марса имају неколико хипотеза које објашњавају како ови минерали указују на промене које су се догодиле окружењу, посебно промене количине воде на површини планете.
Ровер ће користити све своје инструменте за утврђивање порекла ових минерала. Ове стене су још једна од примарних мета у потрази за органским једињењима пошто су оваква окружења могла да подрже настанак микроорганизама.
Два кањона су урезана кроз слојеве материјала који садрже минерале глине и соли сулфата наталожене након формирања слојева. Ови кањони излажу слојеве стена који садрже десетине или стотине милиона година климатских промена. Кјуриосити ће можда моћи да истражи ове слојеве у деловима кањона који су најближи месту слетања и тако приступити подацима о променама окружења на Марсу. Кањони такође садрже седимент који је нанела вода приликом настанка кањона.[75] Ови седименти су били у контакту са водом у време када је ова средина можда била насељена неким облицима живота. Тако да су наслаге у подножју кањона трећа мета у потрази за органским једињењима.
Крстарећи модул управља марсовом научном лабораторијом током лета од Земље до Марса. Садржи компоненте за регулацију температуре и комуникацију са контролом мисије. Пре уласка у атмосферу планете овај модул се одбацује.
Капсула
Капсула садржи силазну фазу. Она штити ровер од елемената током крстарења до планете и оптерећења приликом уласка у Марсову атмосферу. На горњем делу су складиштени падобрани који ће успорити спуштање капсуле. Поред њих се такође налазе антене за комуникацију.
Силазна фаза
Након што су испунили свој задатак топлотни штит и капсула се одвајају и ослобађају силазну фазу. Она обезбеђује сигурно и прецизно постављање ровера на површину Марса што се постиже употребом радара и појединачном контролом ракетних мотора. У овој фази су такође важне комуникационе компоненте, које се користе током фазе крстарења.
Ровер Радозналост
Ровер Кјуриосити је срж мисије и он садржи све најважније научне системе као и делове комуникационог система. Током крстарења стајни органи ровера су кинематски склопљени, ради уштеде простора унутар капсуле.
Топлотни штит
Топлотни штит, како му само име сугерише, штити компоненте од веома високих температура приликом уласка у атмосферу Марса.
Целокупан систем
Током фазе крстарења целокупан систем је масе 3.400 kg[76] и конструисан је тако да може да издржи сва напрезања од лансирања до доласка на површину Марса.
Спустити објекат велике масе на површину Марса је велики изазов. Атмосфера је довољно густа да спречи успоравање и слетање на површину помоћу ракетних мотора (попут система коришћених код слетања на Месец), али је такође довољно ретка да спречи слетање само уз употребу падобрана.[77] Мада су неке претходне мисије користиле ваздушне јастуке за ублажавање слетања, Кјуриосити је превелика да би овај систем могао да се употреби.
За спуштање Кјуриосити на површину Марса биће коришћен нов систем за улазак, спуштање и слетање (енгл.entry, descent, and landing — EDL) који ће омогућити приземљење у елипсу пречника само 20 km. Претходни системи за слетање коришћени за спуштање ровера на површину могли су да спусте сонду у елипсу димензија 150 km x 20 km.[78] Да би се постигла жељена прецизност МНЛ користи више система који раде у тачно одређеном редоследу. Секвенца за улазак, спуштање и слетање се разлаже на четири дела:[79][80]
Навођени улазак:
Падобран МНЛ има пречник 16 метара.
ровер је скупљен унутар капсуле која га штити током путовања кроз свемир од Земље и током уласка кроз атмосферу Марса. Улазак кроз атмосферу се постиже уз помоћ PICA топлотног штита (енгл.Phenolic Impregnated Carbon Ablator). Овај топлотни штит пречника 4,5 m биће највећи топлотни штит икада послат у свемир.[81] Његова улога је да смањи брзину кретања сонде са међупланетарне трансферне која износи 5,3 до 6 km/s на приближно 2 маха при којој је могуће отварање падобрана. Велики део отклањања грешке при слетању се остварује помоћу улазног навигационог алгоритма који је сличан оном који је коришћен при повратку Аполо мисија са Месеца на Земљу. Навођење користи силу узгона коју трпи капсула да одстрани детектоване грешке долета и тако стигне на предвиђено место слетања. Да би капсула имала узгон њен центар масе је померен из централне осе што узрокује да угао уласка у атмосферу буде варијабилан, што такође води порекло од Аполо командног модула. Ово се постиже низом баласта који се могу одбацивати. Вектор узгона контролишу четири пара потисника система за реактивно управљање (енгл.reaction control system — RCS) који производе 500 њутна потиска по пару. Ова способност мењања правца узгона омогућује сонди да реагује на услове окружења и и да се усмери ка месту слетања. Пре отварања падобрана одбацују се баласти тако да се центар масе враћа у осу. Падобран се отвара на висини од око 10 km и брзини 470 m/s.[78]
Спуштање падобраном: када је навођени улазак завршен и сонда успори на 2 маха на висини од око 10 km топлотни штит ће се одвојити и удаљити од капсуле. Затим ће се отворити надзвучни падобран[78] као и код претходних мисија. У марту и априлу 2009. падобран за марсову научну лабораторију је отворен у највећем аеротунелу на свету и прошао квалификациона тестирања.[82] Падобран има 80 носећих ужади, дуг је преко 50 метара и има пречник скоро 16 метара. Отварање овог падобрана је могуће при брзини 2,2 маха и производи 289 килоњутна (30.000 килограма) аеродинамичког отпора у атмосфери Марса.[82]
Спуштање ракетним моторима: након успоравања падобраном, на висини од 1.8 km и при брзини од 100 m/s, ровер и силазна фаза се одвајају од капсуле.[78] Силазна фаза је платформа изнад ровера са 8 варијабилних ракетних потисника који као гориво користе хидразин.
Уметниково виђење — „небески кран“ спушта ровер на површину.
Сваки ракетни потисник производи 400-3.100 килоњутна (40-300 килограма) потиска и развијени су на бази оних који су коришћени код Викинг лендера.[83] У међувремену, ровер ће се трансформисати из скупљеног положаја који је заузимао током крстарења у конфигурацију за слетање, а све то док се спушта испод силазне фазе помоћу „небеског крана“.
Небески кран: овај систем ће лагано спустити ровер на површину Марса.[78] Састоји се из три сајле које спуштају ровер и једне пупчане сајле која преноси електричне сигнале између небеског крана и ровера. На удаљености од 7,5 m од крана систем се зауставља и ровер се спушта на површину планете. Након спуштања чека се 2 секунде на потврду да је ровер на чврстој подлози а онда се активирају мале пиротехничке направе које пресецају каблове и ослобађају небески кран од ровера. Кран затим одлеће на безбедну удаљеност и пада на површину а ровер почиње припреме за тумарање по површини Марса. Планирани „небески кран“ систем никада до сада није употребљен на некој мисији.
Анимација која приказује најзначајније догађаје од лансирања до слетања на површину Марса.
Операције ровера на површини планете се мере у марсовским данима који се називају сол. 1 сол = 24 сата 39 минута и 35 секунди. Сол када је ровер слетео на површину је Сол 0.
Сол 0:
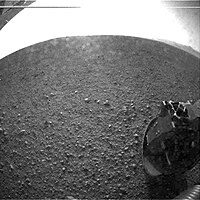
Прва фотографија високе резолуције коју је ровер послао са површине Марса.
Ровер се успешно приземљио на површину црвене планете у 05.17.57 UTC. Сигнал о успешном слетању је на Земљу стигао преко сонде Марс Одисеј у орбити око Марса, која је пратила слетање и слала најбитније информације у реалном времену назад у контролу мисије. Сигнал је каснио пар минута јер је Марс у тренутку слетања био удаљен више десетина милиона километара од Земље. Само пар минута након слетања ровер је послао прву слику мале резолуције чиме је потврђено успешно приземљење.[84] Два сата након слетања ровер је послао прву слику високе резолуције (512 x 512 пиксела) која приказује окружење у које је ровер слетео — каменито тло Гејл кратера.[85]
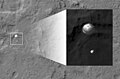
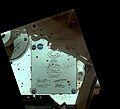
У време слетања у визуелном домету је била и сонда Орбитални истраживач Марса која је са удаљености од 340 километара, помоћу камере HiRISE, успела да сними фотографију на којој се види отворен суперсонични падобран пречника 16 метара. У том тренутку ровер се још увек налазио спакован унутар заштитне шкољке и на приближно 3 километра изнад површине Марса.[86] Пар сати након слетања стигло је и 297 фотографија камере MARDI. Ове фотографије су резолуције 192 x 144 пиксела, али се у наредним месецима мисије очекује пуна резолуција 1600 x 1200 и тиме ће бити састављен први видео слетања на другу планету у високој резолуцији.[87] Током првог сола укупно је на Земљу послато око 5 мегабајта података путем сонде Марс Одисеј.
Сол 1 и 2:
Серија фотографија приказује утицај ChemCam инструмента на стену.
Ровер врши тестирање унутрашњих система. Током налета орбитера ка контроли мисије се путем UHF сигнала шаљу додатне слике, укључујући и фотографије у пуној резолуцији камере MARDI. Главна антена ровера је успешно усмерена ка Земљи. Стуб ровера је успешно подигнут у усправан положај и извршено је више покрета како би се утврдила његова исправност. Измерена је количина површинске радијације помоћу инструмента RAD, али ти подаци тек треба да се пошаљу ка Земљи. Унутрашња температура ровера је благо повишена, али узрок томе није техничке природе већ је температура унутар Гејл кратера виша од предвиђене.[88]
Сол 4 и 5: Ровер је послао прве слике Гејл кратера у високој резолуцији.[89] Извршене су припреме за „трансплантацију мозга“ ровера. Током крстарења и уласка у атмосферу Марса меморија ровера је била испуњена програмом за слетање. Овај програм садржи само најосновније команде за првих пар дана на површини планете након слетања. Програмери ће у наредним данима послати нови софтвер који ће бити инсталиран у примарни и секундарни компјутер ровера. Овај софтвер садржи све најбитније команде за вожњу, операције роботске руке, камера и свих инструмената на роверу.[90]
Сол 8: Летелица Орбитални истраживач Марса шаље слику у боји камере HiRISE на којој се види ровер.[91]
Сол 11:
Тест задњег десног точка ровера, као припрема за прву вожњу. (Сол 15)
Тим истражитеља је одредио циљеве у околини слетања који ће бити истражени ровером. Прва станица ће бити место названо Гленелг (енгл.Glenelg), удаљено око 400 метара југоисточно од места слетања. На овој локацији се налазе слојевите стене које су добра мета за бушење помоћу роботске руке.[92]
Сол 13 и 14: Ровер је први пут употребио инструмент ChemCam на камен величине песнице. Током периода од 10 секунди испаљено је 30 ласерских пулсева, сваки од њих снаге милион вати и сваки трајања око пет наносекунди.[93] Роботска рука је „испружена“ и тестирана низом покрета да би се утврдило да није дошло до оштећења током слетања.[94]
Сол 15 и 16: Инструмент REMS је прикупио прве метеоролошке податке. На основу ових података утврђено је да се температура креће од -3 до -91 °C. Инструмент DAN је почео да испаљује неутроне који продиру у тло и детектују водоник који је на Марсу присутан у пределима где има воде или минерала који су били изложени води. Систем кретања је тестиран.[95] Дан касније ровер је први пут покренуо точкове на месту Бредбери. Тим ровера је одлучио да место слетања назове по славном писцу научне фантастике Реју Бредберију, који је недавно преминуо. Ровер је возио напред, окренуо се за 90° а затим за дужину ровера уназад. Овим кретањем се ровер нашао око 6 метара од места слетања. Контрола мисије је примила слике вожње, као и слике које показују како је испаљивање ласера утицало на стену која је циљана.[96]
Сол 21:MastCam камера је снимила ову фотографију подножја планине Шарп. Јасно се виде разни слојеви из геолошке историје Марса. (Сол 21)По први пут у историји истраживања свемира људски глас је послат путем радија ка некој планети и затим враћен назад. Помоћу мреже дубоког свемира инжењери су ка Марсу послали снимљену поруку коју је примио ровер Радозналост и затим је упутио назад ка Земљи. У поруци администратор агенције НАСА, Чарлс Болден, говори о потешкоћама слетања на Марс, упућује честитке тиму који је дизајнирао ровер и истиче да је радозналост та која подстиче људе да истражују. У контролу мисије су стигле и прве слике камере MastCam које приказују подножје планине Шарп и њене слојеве. Главни инжењер за телекомуникацију са ровером је изјавио да је већ примљено више података него од свих претходних ровера заједно.[97]
Сол 22: Након дугог чекања, ровер се упутио са места слетања ка првој локацији за истраживање, Гленелг, удаљеној 400 метара. Током 22. дана мисије ровер је прешао 16 метара ка истоку.[98] По први пут у траговима које остављају точкови ровера су се могла видети слова ЈПЛ, написана Морзеовом азбуком.[99]
Сол 25: Након више дана вожње, ровер Кјуриосити је застао и провео сол 25 сликајући своје окружење. Навигационе камере су коришћене током ноћи у потрази за облацима. Поред тога, ровер је прикупио метеоролошке податке.[100]
Сол 29: Ровер је прешао 30,5 метара ка југоистоку. Ово је најдужа вожња од почетка мисије и повећава укупан пређени пут на 109 метара.[101]
Сол 30–34:
Ова панорама се састоји од девет слика које је снимила MAHLI камера током 34. дана мисије. Приказује доњу страну ровера, точкове, а видљиве су и предње камере за избегавање препрека.
Након више узастопних дана вожње, ровер је застао на пар дана да испроба и калибрише роботску руку. На крају роботске руке се налазе инструменти који ће бити употребљени за испитивање стена и тла на Марсу. Тестови укључују позиционирање изнад површине, ротацију и укључивање инструмената, позиционирање за доставу узорака тла у инструменте на горњој страни ровера, као и фотографисање помоћу камере MAHLI.[102] Планиране активности су обустављене на један дан због очитавања о повишеној температури унутар роботске руке. Инжењери су касније установили да се не ради о већем проблему, тако да су тестови настављени следећег дана. Извршено је тестирање алата за скупљање узорака тла, као и вибрациони тест.[103] Активности током 34. дана мисије су потврдиле исправност и употребљивост MAHLI камере, која је коришћена за проверу прецизности руке током позиционирања за више активности. По први пут камера MAHLI је снимила фотографију са отвореним поклопцем који служи као заштита од прашине. Снимљене су фотографије камера на врху стуба ровера, цела доња страна ровера, као и калибрационе мете за сам MAHLI инструмент. Међу овим метама је и новчић са ликом председника САД Абрахама Линколна из 1909. године. Постављање новчића је традиција геолога да ставе објекат познатих димензија наспрам узорака да би могли тачно да одреде његове особине. Тиме је и шира јавност могла да добије представу које су величине објекти испитивани помоћу овог инструмента.[104]
Сол 35–37:
Кјуриозити користи инструмент APXS за анализу стене Џејк Матијевић.
Настављена је провера инструмената роботске руке. Спектрометар алфа-честица X-зрака (APXS) извршио је мерење хемијског састава калибрационе мете. Затим је извршена ротација и позиционирање руке у неутралан положај за испитивање. Инструмент DAN је извршио мерења током шест сати.[105] Сол 37 је последњи дан тестирања роботске руке. Током дана је извршен вибрациони тест алата који обрађује узорке тла или уситњених стена, које сакупљају кашика или бушилица. Овај уређај поседује коморе за сортирање узорака, пре него што их достави на анализу другим инструментима.[106]
Сол 38–42: Ово су били дани вожње за ровер. Пређени пут је био: 32m, 22m, 37m, 27m и 32m. Током вожњи ровер је застајао на сваких 10m како би инструмент DAN извршио мерења.[107][108] Током 42. сола ровер је застао да сними прелазак Фобоса и Дејмоса преко сунчевог диска.[109][110]
Сол 44–49: Због неповољних услова за телекомуникацију са Земљом, ровер је провео сол 44 сликајући атмосферске услове током раног јутра, извршио инспекцију омањег камена и сликао инструменте на горњој страни ровера. Тим који оперише ровером је одлучио да се приближи оближњем камену који је назван Џејк Матијевић и на њему по први пут испроба инструменте роботске руке. Џејкоб Матијевић (1947—2012) био је главни инжењер за сва три ровера који су упућени ка површини Марса.[111] Ровер је 46. дана мисије први пут додирнуо стену инструментима који се налазе на роботској руци. Прво је коришћен спектрометар алфа-честица X-зрака (APXS) који одређује каква је хемијска структура стене. Затим је камера MAHLI коришћена за снимке из близине. Оба инструмента су коришћена и на стени Џејк Матијевић 47. дана мисије. Инструмент ChemCam је такође коришћен 48. сола, тако да су научници могли да упореде очитавања са овог и APXS инструмента. Након тога ровер се упутио ка истоку, прешавши 42 метра.[112]
Сол 49 и 50:
Поређење стена откривених на Марсу (лево), са стенама које су настале у присуству воде на Земљи (десно).
Кјуриосити наставља пут ка локацији Гленелг. Током ова два сола укупно је прешао 80 m и подигао укупан пређени пут на 416 m.[113][114]
Сол 51 и 52: Ровер је нашао доказе да је на месту на коме се налази некада у прошлости текао брзи поток. Докази о постојању воде на површини Марса су прикупљени и раније, али Кјуриосити је по први пут открио шљунак који је водена бујица носила са собом по кориту потока. Научници проучавају прикупљене фотографије каменчића који су зацементирани у слоју тла. Величина и облик каменчића може показати која је била брзина и величина давног воденог тока.[115] Наредног сола ровер је прешао 37,3 m ка истоку. Након вожње сликани су трагови ровера да би се проверило да ли точкови проклизавају или имају добро приањање. Након ове вожње ровер се налази на само пар метара од потенцијалне локације за коришћење инструмената на роботској руци.[116]
Сол 53–55: Извршена је инспекција оближње локације инструментима MAHLI и APXS, након чега се ровер упутио ка новој локацији удаљеној око 24 m. Ову локацију су научници назвали Рокнест и она је кандидат за прикупљање узорака тла роботском руком.[117]
Сол 56:
Камера MastCam је снимила ову фотографију на којој се види кашика са узорком тла, и увеличано непознати објекат.
Ровер се померио додатних 6 m ка таласу који је настао наносом песка и прашине. Током дана такође су коришћени инструменти RAD, DAN и REMS за надгледање окружења око ровера.[118]
Сол 57:Кјуриосити је „загазио“ у талас песка како би научници боље разумели расподелу честица и густину, пре него што нареде роверу да употреби своју кашику и прикупи узорке. Кашика има облик шкољке ширине 4,5 cm, дужине 7 cm и може да захвати око 3,5 cm у дубину тла.[119]
Сол 61–63: Кашика роботске руке је успешно прикупила узорак растреситог тла на локацији Рокнест. Фотографије су потврдиле да је захват прошао по плану. Рука је протресла узорак како би вишак материјала спао са страна.[120] Тим ровера је одлучио да одложи планиране активности за сол 62 јер се на једној од фотографија види сјајан објекат на површини који је можда део роботске руке. Ровер ће прикупити додатне фотографије како би тим могао да утврди порекло објекта и процени да ли ће, и колики утицај имати на даље активности.[121] Слике камере ChemCam сугеришу да се вероватно ради о малом делу пластике који је отпао са ровера, али ће тим искористити још један дан да се потврди о ком тачно делу се ради. План је да се користи камера MastCam за сликање објекта.[122]
Сол 65:
Стена Џејк Матијевић. Црвене тачке показују места где је испаљиван ChemCam ласер, док љубичасти кругови показују места где је вршена анализа APXS инструментом.
Кјуриосити је обавио неколико активности као припрему за узимање другог узорка тла. Као и у случају првог узорка, и други ће бити са локације Рокнест и биће искоришћен за чишћење унутрашњих површина алата за сортирање узорака CHIMRA. Алат CHIMRA (енгл.Collection and Handling for In-Situ Martian Rock Analysis) у преводу значи „прикупљање и сортирање узорака за анализу стена на Марсу“. Након одбацивања првог (пробног) узорка, ровер је фотографисао унутрашњост механизма како би се потврдило да нема остатака од првог узорка.[123] Анализом података које је Кјуриосити прикупио током испитивања стене Џејк Матијевић научници су дошли до закључка да је њен састав разноврснији него код стена које су анализиране током ранијих мисија. Стена такође својим саставом подсећа на неке стене из унутрашњости Земље. Ровер је употребио два инструмента како би утврдио хемијски састав стене. Резултати анализе потврђују да су нека од скоријих мерења тачна и служе као пример зашто је анализа унутрашњег састава стена тако важан део целе мисије. Састав стена описује у каквом су окружењу настале и какав су утицај на њих имали планетарни процеси. На Земљи, стене са саставом сличним стени Џејк Матијевић обично настају у процесима који се дешавају у мантлу планете, испод тврде земљине коре, током кристализације магме под високим притиском.[124]
Сол 66–69: Други узорак, прикупљен током 66. дана мисије, је такође одбачен сол касније јер је научни тим страховао да би непознати светли материјал, чије порекло још није утврђено, могао да угрози аутентичност података током анализе.[125] Трећи узорак је прикупљен током 69. дана мисије и након сортирања CHIMRA механизмом, први чврсти узорак стене је достављен на анализу инструменту CheMin. Анализом ће се утврдити који се минерали налазе у саставу узорка.[126]
Сол 69–75: Ровер је током сола 74 прикупио четврти узорак тла који ће бити искоришћен за чишћење унутрашњих површина CHIMRA механизма. Роверу су послате инструкције да мали део четвртог узорка достави на тас за опсервацију, као и да један део узорка сортира за анализу CheMin инструментом. Упоредо са активностима роботске руке, Кјуриосити је испитивао своје окружење и свим другим инструментима: камере ChemCam и Mastcam су снимале околни терен, док су инструменти RAD, REMS и DAN прикупили податке о радијацији, атмосферским условима и присутности воде испод површине.[127]
Сол 75–82:
Први рендгенски снимак марсовског тла. Са фотографије се види да је састав тла сличан базалтном тлу у околини вулкана на Хавајима.
Током 78 дана мисије Кјуриосити је камером Mastcam посматрао понашање узорака стене на опсервационом тасу током вибрација роботске руке.[128]Кјуриосити је 82. дана мисије снимио стене у околини помоћу камере MAHLI и почео припреме за анализу узорка стене инструментом CheMin. Током претходног сола, ровер је помоћу SAM инструмента анализирао узорак атмосфере Марса. Настављена су и редовна испитивања другим инструментима.[129] Објављени су први резултати анализе минералошког састава тла. Ови подаци указују на то да је тло Марса сличног састава као базалтно тло у околини вулкана на Хавајима. Овим подацима се попуњавају рупе у разумевању састава површинског тла Марса, али се и доказују претпоставке научника за које до сада није било довољно конкретних доказа. Идентификација минерала у стенама и земљишту је примарни циљ Кјуриоситија, како би се стекла знања о еколошким условима на планети у прошлости. У сваком минералу остају записани подаци о условима околине у којој је настао. Хемијски састав стена пружа двосмислене информације, за шта су најбољи пример минерали дијамант и графит који имају исти хемијски састав, али су им структура и својства потпуно различите. Узорак за анализу је прво прошао кроз сито како би се одстраниле честице веће од 150 микрометара, што је приближно ширини једне длаке људске косе. Узорак садржи најмање две компоненте: прашину која се разноси по целој површини планете током пешчаних олуја и ситан песак који је локалног порекла. За разлику од већих стена, које је ровер испитао у протеклим недељама, старих пар милијарди година и које указују на присуство воде, узорци који су сада анализирани представљају утицај недавних процеса на Марсу, у којима није било већег утицаја воде.[130]
Сол 82–89: Након три месеца рада по „марсовском времену“, тим ровера је по плану прешао да ради по стандардном земаљском времену. Пошто је дан на Марсу (сол) дужи око 40 минута него дан на Земљи, дневни распоред тима се померао пар сати унапред сваке седмице, што је значило да су чланови тима морали да раде до касно у ноћ. Почевши од ове седмице, радни дан чланова тима ће бити у границама од 08.00 до 20.00 часова. Овај прелазак означава и почетак смањења броја научника који су директно укључени у операције ровера од слетања у августу. Већи број научника и инжењера ће се вратити својим регуларним пословима, али ће бити у контакту са контролом мисије путем интернета и учествоваће у планирању и извршавању операција ровера.[131]
Сол 89–96: Мала количина прашине је постала први чврсти узорак достављен на анализу највећем инструменту ровера Кјуриосити. Инструмент SAM анализира хемијски састав узорака у потрази за хемијским елементима који омогућавају опстанак живог света. Током 9. новембра роботска рука је доставила узорак до инструмента који га је током наредна два дана анализирао масеномспектрометријом, гасном хроматографијом и ласерском спектрометријом. Научници су изјавили да су прикупљени подаци стигли у контролу мисије и да током наредних недеља следи њихова детаљна анализа.[132]
Сол 98: Подаци које је Кјуриосити прикупио о обрасцима ветрова и природној радијацији помогли су научницима да боље разумеју услове који владају на површини црвене планете. Научници су помоћу инструмената идентификовали пролазне вртлоге ваздуха, мапирали ветрове у односу на падине Гејл кратера, пратили дневне и сезонске промене у ваздушном притиску и успели да уоче повезаност између периодичних промена радијације са дневним атмосферским променама. Знање стечено о овим процесима помаже истраживачима у разумевању доказа о еколошким променама на Марсу које су некада у прошлости можда биле погодне за опстанак живота. Дванаест недеља након слетања ровера у Гејл кратер, међународни тим научника је из прикупљених података успео да идентификује више од 20 атмосферских догађаја, од којих бар један има особине вртложног кретања ваздуха налик торнаду. Подаци о ветру су прикупљени инструментом REMS. У ове особине спадају кратак пад у ваздушном притиску, промена правца ветра, промена брзине ветра, повишење температуре ваздуха или пад ултраљубичасте светлости која стиже до ровера. Два, од документованих 20, су имала свих пет карактеристика.
У многим регионима на Марсу уочени су трагови кретања и сенкепешчаних ђавола, како научници називају вртлоге прашине налик торнаду. Међутим, ови визуелни докази нису до сада уочени унутар Гејл кратера. Једна могућност је да се вртложни ветрови крећу унутар кратера, а да притом не подижу велику количину прашине, као што је то случај у другим регионима. Прашина има велику улогу у обликовању климе на Марсу. Прашина која се подиже у атмосферу током пешчаних ђавола и пешчаних олуја утиче на пораст температуре ваздуха.
Ова слика приказује „топлотне плиме“ на Марсу, временски феномен који је одговоран за велике, дневне варијације у ваздушном притиску на површини планете.
Доминантан правац ветра који је открио инструмент REMS изненадио је научнике, који су очекивали да ће падине условити да се ветар креће правцем север–југ. Ровер се налази са северне стране планине Шарп, која се налази у центру кратера. Ако се иде логиком да падине планине утичу на правац ветра, онда би правац требало да буде север–југ, међутим, доминантни су ветрови из правца исток–запад. Узвишени обод кратера је могући узрок за овакво кретање. Подаци о атмосферском притиску REMS инструмента показују сезонски раст као и дневни ритам. Ни једно ни друго није очекивано, али помаже научницима да разумеју атмосферске циклусе на данашњем Марсу, што може помоћи у процени атмосферских услова који су некада владали на површини планете.
Сезонско повећање ваздушног притиска настаје због утицаја угљен-диоксида који је био замрзнут у јужној поларној леденој капи током зиме, па се током преласка из пролећа у лето на јужној полулопти ослобађа у атмосферу. Дневни циклус повишеног притиска у јутарњим и сниженог притиска у вечерњим сатима настаје због загревања атмосфере сунчевом енергијом. Са кретањем површине планете од истока ка западу, заједно са њом се креће и талас загрејане, проширене атмосфере, познат као топлотна плима. Ефекти те топлотне плиме се појављују и у подацима инструмента RAD. Овај инструмент прати високоенергетско зрачење које представља здравствени ризик за космонауте, и има утицај на то да ли микроби могу да опстану на површини Марса.[133]
Сол 100:Кјуриосити је поново у покрету, након неколико недеља испитивања на локацији Рокнест. Прво је извршена мала вожња, 1,9 метара, да би камен назван „Рокнест 3“ био у домету роботске руке. Овај камен је сол касније испитан инструментом APXS, извршена су два десетоминутна очитавања о саставу хемијских елемената унутар камена. Након тога, ровер је складиштио руку у неутрални положај и одвезао се 25,3 метра у правцу истока, ка узвишењу Поинт лејк (енгл.Point Lake). Ово је први пут да је ровер извршио анализу неким инструментом и вожњу у истом дану. У предстојећој паузи, током Дана захвалности, Кјуриосити ће помоћу камере Mastcam са овог узвишења осмотрити терен ка истоку у потрази за локацијама за истраживање и повољним рутама за вожњу. Приоритет је проналажење погодног камена на којем ће се први пут употребити бушилица, која ће уситнити стену и прикупити уситњене узорке из њене унутрашњости. Иако је ровер напустио локацију Рокнест, пети и последњи узорак тла који је сакупљен још увек се налази у унутрашњости ровера. Овај узорак се чува како би, ако за то буде потребе, могао касније да буде анализиран другим инструментима ровера.[134]
Глобални снимак Марса камером MCI, 18.11.2012. Белим стрелицама је оивичена пешчана олуја у јужној полулопти. Означена су и места на којима се налазе ровери Опортјунити и Кјуриосити.
Пешчана олуја, коју летелица Орбитални истраживач Марса прати од прошле недеље, проузроковала је промене у атмосфери које су детектовали и ровери на површини планете. Орбитер је помоћу камере MARCI почео да прати олују од 10. новембра по земаљском времену. Олуја је пришла на 1.347 километара од ровера Опортјунити, узрокујући веома мало смањење прозирности атмосфере изнад ровера, који не поседује сопствену метеоролошку станицу. На другој страни планете, ровер Кјуриосити је својим инструментима измерио промене у атмосфери узроковане олујом. Сензори инструмента REMS, који је конструисан у Шпанији и достављен у ЈПЛ на уградњу пре лансирања, уочили су пад у атмосферском притиску и благо повишење ноћне температуре. Година на Марсу траје две земаљске године. Регионалне пешчане олује шириле су се и утицале на целу планету током 2001. и 2007. године, али се од тада нису појављивале. Након деценија проучавања Марса, научници знају да постоји образац по којем се ове пешчане олује појављују. Сезона пешчаних олуја је почела пре само пар недеља, са почетком пролећа у јужној полулопти. Почевши од 16. новембра, инструмент MCS је забележио повишење температуре атмосфере на висини од 25 километара изнад олује. Од тада, температура у том региону се повећала за 25 °C. Ово се дешава зато што прашина упија зраке сунца на тој висини, што указује да се прашина диже на велике висине и ствара услове налик магли од прашине изнад великог подручја. Осим научног значаја и разумевања понашања олује, њено надгледање је веома важно за ровере који се налазе на површини планете. У случају да олуја постане глобална, најгоре би прошао ровер Опортјунити. Повећана концентрација прашине у атмосфери заклања Сунце, али се такође таложи на соларне панеле који напајају ровер, и самим тим угрожава његово функционисање. Кјуриосити се напаја радиоизотопним термоелектричним генератором, а не соларним панелима, тако да не би било великог утицаја на операције ровера, осим благог повишења радне температуре.[135]
Сол 107: Ровер Кјуриосити је започео своје епско путовање ка Марсу 26. новембра 2011. године, лансирањем из свемирског центра Кенеди на Флориди. Годину дана након лансирања и 16 недеља након драматичног слетања у Гејл кратер, Кјуриосити је послао 23.000 фотографија, прешао 517 метара по прашњавој површини Марса и анализом тла и околине помогао научницима да боље разумеју еколошку историју региона. Кјуриосити се тренутно налази на локацији Поинт лејк, осматра терен ка истоку где ће изабрати погодан камен за прву анализу бушилицом роботске руке.[136] Пешчана олуја коју летелица МРО надгледа из орбите полако јењава. За разлику од претходних олуја које су праћене орбитерима у претходној деценији, ова олуја се није претворила у глобалну. По први пут у историји истраживања Марса развој олује је праћен из орбите и са површине, уз помоћ инструмената за надгледање атмосферских услова које поседује ровер Кјуриосити. Научници се надају да ће велика количина података која је прикупљена разјаснити зашто се ова олуја није претворила у глобалну, а самим тим помоћи у прогнози олуја које ће се формирати у будућности.[137]
Сол 108–130:
На слици, коју је снимила летелица МРО, види се кретање ровера од слетања на Марс до 130. сола мисије. Увеличани део детаљније приказује куда се ровер кретао током последњих пар недеља.
Ровер је током 10. децембра по земаљском времену, у преподневним часовима, прешао 19 метара и стигао до места где је терен нижи у односу на место слетања. Ова област је названа Јелоунајф беј (енгл.Yellowknife Bay), и научници ће на овој локацији одредити погодну стену на којој ће први пут употребити бушилицу која се налази на роботској руци ровера. Ово је био четврти узастопни сол вожње за Кјуриосити, од када је напустио локацију Рокнест на којој је провео претходни месец. Током ова четири сола, ровер је укупно прешао 79 m и тиме је укупан пређени пут од слетања достигао 598 метара. На путањи ровера се нашла стена названа Шејлер (енгл.Shaler), коју је ровер испитао помоћу инструмената ChemCam и Mastcam, како би научници утврдили њен хемијски састав и детаљније проучили спољашњу слојевиту структуру. Кјуриосити је последњу од четири вожње завршио 30% краће, јер прорачуни нагиба ровера нису били усаглашени. Ово није представљало велики проблем, али је софтвер интервенисао и дао команду роверу да се заустави ради сигурности. Инжењери су појаснили да се ровер до сада кретао по релативно равном терену, тако да није било већих нагиба на којима би се јавила разлика у прорачунатом нагибу, али је добро што је ровер одмах реаговао тако да софтвер може да се прилагоди неравном терену који ће се сретати и убудуће.[138]
Сол 130–147:Кјуриосити истражује област Јелоунајф беј у потрази за првом стеном на којој ће употребити своју вибрациону бушилицу. Употреба бушилице за прикупљање узорака из унутрашњости стене, подвиг који никада раније није покушан на Марсу, је примарни циљ научника за почетак 2013. године. Терен на локацији Јелоунајф беј је другачији од терена по којем се ровер кретао од слетања на Марс, 6. августа2012. године. Терен на којем се ровер сада налази је један од три типа терена који се укрштају на локацији Гленелг, која је била успутна станица на путу ка Јелоунајф беју. Кјуриосити је стигао до обода ове депресије вожњом дугом 14 m, током 11. децембра. Следећег сола, вожњом од 26,1 m, ровер је увелико зашао у басен. Научници су успут максимално користили инструменте Mastcam и ChemCam, како би испитали околне стене. Затим је 14. децембра, вожњом од 32,8 m, пришао стенама које су научници хтели детаљније да испитају, а назване су Костело (енгл.Costello) и Флаерти (енгл.Flaherty).
Камера MAHLI је снимила употребу алата за уклањање прашине са удаљености од око 25 cm.
Кјуриосити је испитао ове стене помоћу инструмената који се налазе на врху роботске руке, APXS и MAHLI. По завршетку тих испитивања, ровер је наставио дубље унутар басена вожњом од 5,6 m. Овом вожњом је укупан пређени пут од слетања достигао 677 метара. Планирана је још само једна вожња, пре одласка тима на одмор током Божића и Нове године. Ровер ће наставити да истражује околину са места на којем ће се наћи након те последње вожње. Помоћу свих камера прикупиће детаљне снимке окружења како би научници лакше одабрали следеће стене за испитивање. План је да се већи део 2013. године проведе у вожњи ка примарној локацији за истраживање, планини Шарп, удаљеној око 5 километара.[139]
Сол 150:Кјуриосити је по први пут употребио свој алат за уклањање прашине (енгл.Dust Removal Tool) са површине стене. Алат се састоји од моторизоване челичнечетке и његов задатак је да припреми површину стене за анализу другим инструментима. Алат се налази на врху роботске руке ровера. Спектрометар алфа-честица X зрака и камера роботске руке, инструменти који се такође налазе на роботској руци, имају највише користи од овог алата јер могу да прикупе податке које не би могли да је стена прекривена слојем прашине. Стена је добила назив Еквир_1 (енгл.Ekwir_1).[140]
Сол 165:Кјуриосити је по први пут употребио камеру роботске руке (MAHLI) за снимање фотографија током ноћи, уз помоћ обичног и ултраљубичастог осветљења. Научници су употребили камеру за испитивање стене назване Сајунеј (енгл.Sayunei), која се налази на месту куда је прошао предњи леви точак ровера и уситнио материјал, тако да је откривен унутрашњи слој стене. Слике су снимљене 22. јануара, а на Земљу су стигле 23. јануара. MAHLI, камера у боји са адаптивним фокусом, има сопствене изворе светлости – LED диоде (енгл.Light-emiting diode). Ултраљубичаста светлост је коришћена јер се помоћу ње могу видети флуоресцентни минерали.[141]
Овај график показује процентуалну расподелу гасова у атмосфери Марса, измерену квадруполним масеним спектрометром. Најзаступљенији је угљен-диоксид који чини 95,9% атмосфере.
Камен Рокнест 3 сликан камером MastCam 59. дана мисије. Дуг је око 40 cm и висок око 10 cm.
Ова фотографија камена Рокнест 3 комбинује две слике снимљене ChemCam инструментом (уоквирено на претходној слици). Истакнуто је пет тачака на које је испаљен ласер да би се проверио састав стене.
Слика стене Еквир_1, коју је камера MAHLI снимила са удаљености од само 1 cm, након употребе алата за уклањање прашине.
^Alan Buis/Carolina Martinez (27. 5. 2009). „NASA Selects Student's Entry as New Mars Rover Name” (на језику: (језик: енглески)). НАСА. Архивирано из оригинала 28. 01. 2012. г. Приступљено 11. 2. 2012. „НАСА изабрала име ровера на основу предлога ученика”CS1 одржавање: Непрепознат језик (веза)
^„Mars science laboratory: Mission” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 10. 07. 2011. г. Приступљено 11. 2. 2012. „Мисија марсове научне лабораторије”CS1 одржавање: Непрепознат језик (веза)
^„Mars Science Laboratory/Curiosity” (на језику: (језик: енглески)). НАСА. Архивирано из оригинала 21. 2. 2011. г. Приступљено 14. 2. 2012. „Марсова научна лабораторија/Кјуриосити”CS1 одржавање: Непрепознат језик (веза)
^Watson, Traci (14. 4. 2008). „Troubles parallel ambitions in NASA Mars project” (на језику: (језик: енглески)). USA TODAY. Приступљено 14. 2. 2012. „Проблеми паралелно са амбицијама марсове научне лабораторије”CS1 одржавање: Непрепознат језик (веза)
^„Keeping it Cool (…or Warm!)” (на језику: (језик: енглески)). НАСА. 12. 9. 2008. Архивирано из оригинала 24. 12. 2010. г. Приступљено 14. 2. 2012. „Систем грејања/хлађења”CS1 одржавање: Непрепознат језик (веза)
^„The rover's "brains"” (на језику: (језик: енглески)). ЈПЛ. Приступљено 14. 2. 2012. „Мозак ровера”CS1 одржавање: Непрепознат језик (веза)
^„RAD750® FAMILY OF PRODUCTS” (на језику: (језик: енглески)). BAE Systems. Архивирано из оригинала 14. 8. 2012. г. Приступљено 14. 2. 2012. „Породица процесора RAD750”CS1 одржавање: Непрепознат језик (веза)
^Cady, Anne (јануар 2002). „RAD750 System Flight Computer”(PDF) (на језику: (језик: енглески)). JPL. Архивирано из оригинала(pdf) 5. 3. 2016. г. Приступљено 13. 10. 2012. „RAD750 процесор”CS1 одржавање: Непрепознат језик (веза)
^Andre Makovsky & Taylor, Jim (новембар 2009). „Mars Science Laboratory Telecomunications System Design”(PDF) (на језику: (језик: енглески)). JPL. Архивирано из оригинала(pdf) 28. 02. 2013. г. Приступљено 13. 10. 2012. „Телекомуникациони систем ровера”Пронађени су сувишни параметри: |author2= и |last2= (помоћ)CS1 одржавање: Непрепознат језик (веза)
^„Маrs earth distance” (на језику: (језик: енглески)). WolframAlpha. Приступљено 13. 10. 2012. „Тренутна удаљеност Земље од Марса”CS1 одржавање: Непрепознат језик (веза)
^„New Mars Rover to Feature Morse Code” (на језику: (језик: енглески)). ARRL. 23. 3. 2011. Приступљено 14. 2. 2012. „Морзеова азбука на роверу”CS1 одржавање: Непрепознат језик (веза)
^Malin, Michael C. „Mast Camera (Mastcam)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 08. 08. 2012. г. Приступљено 23. 2. 2012. „Стубна камера”CS1 одржавање: Непрепознат језик (веза)
^Edgett, Kenneth S. „Mars Hand Lens Imager (MAHLI)” (на језику: (језик: енглески)). Архивирано из оригинала 15. 08. 2012. г. Приступљено 23. 2. 2012. „Камера роботске руке”CS1 одржавање: Непрепознат језик (веза)
^Malin, Michael C. „Mars Descent Imager (MARDI)” (на језику: (језик: енглески)). Архивирано из оригинала 07. 08. 2012. г. Приступљено 23. 2. 2012. „Камера за сликање при слетању”CS1 одржавање: Непрепознат језик (веза)
^„Mastcam Instrument Description” (на језику: (језик: енглески)). Malin Space Science Systems. Приступљено 23. 2. 2012. „Опис инструмента MastCam”CS1 одржавање: Непрепознат језик (веза)
^McCarthy, Erin (30. 8. 2010). „James Cameron Designs 3D Camera for Mars Rover” (на језику: (језик: енглески)). popularmechanics.com. Приступљено 23. 2. 2012. „Џејмс Камерон учествовао у креирању камера”CS1 одржавање: Непрепознат језик (веза)
^David, Leonard (28. 3. 2011). „NASA Nixes 3-D Camera for Next Mars Rover” (на језику: (језик: енглески)). SPACE.com. Приступљено 24. 2. 2012. „Неће бити 3Д камере на роверу”CS1 одржавање: Непрепознат језик (веза)
^Wiens, Roger C. „Chemistry & Camera (ChemCam)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 20. 07. 2011. г. Приступљено 26. 2. 2012. „Хемијска камера”CS1 одржавање: Непрепознат језик (веза)
^„MSL ChemCam on Mars” (на језику: (језик: енглески)). ЈПЛ. Приступљено 26. 2. 2012.CS1 одржавање: Непрепознат језик (веза)
^ абвWiens, Roger C. „Chemistry & Camera (ChemCam)” (на језику: (језик: енглески)). Архивирано из оригинала 20. 07. 2011. г. Приступљено 26. 2. 2012. „Хемијска камера”CS1 одржавање: Непрепознат језик (веза)
^„ChemCam fact sheet”(PDF) (на језику: (језик: енглески)). lanl.gov. јул 2004. Архивирано из оригинала(pdf) 08. 02. 2012. г. Приступљено 26. 2. 2012. „Карактеристике хемијске камере”CS1 одржавање: Непрепознат језик (веза)
^„ChemCam Status” (на језику: (језик: енглески)). LOS ALAMOS NATIONAL LABORATORY. August, 2010. Архивирано из оригинала 09. 11. 2013. г. Приступљено 26. 2. 2012. „Статус хемијске камере”Проверите вредност парамет(а)ра за датум: |date= (помоћ)CS1 одржавање: Непрепознат језик (веза)
^ абвгMahaffy, Paul. „Sample Analysis at Mars (SAM)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 20. 07. 2011. г. Приступљено 26. 2. 2012. „Анализа узорака на Марсу”CS1 одржавање: Непрепознат језик (веза)
^„Sample Analysis at Mars” (на језику: (језик: енглески)). Годард спејс флајт центар. Приступљено 26. 2. 2012. „Анализа узорака на Марсу”CS1 одржавање: Непрепознат језик (веза)
^„SAM: An International Effort” (на језику: (језик: енглески)). Годард спејс флајт центар. Приступљено 26. 2. 2012. „Међународна сарадња на конструкцији инструмента”CS1 одржавање: Непрепознат језик (веза)
^Tenenbaum, David (6. 9. 2008). „Making Sense of Mars Methane” (на језику: (језик: енглески)). astrobio.net. Приступљено 26. 2. 2012. „Схватање метана на Марсу”CS1 одржавање: Непрепознат језик (веза)
^Mitrofanov, Igor. „Dynamic Albedo of Neutrons (DAN)” (на језику: (језик: енглески)). JPL. Архивирано из оригинала 20. 07. 2011. г. Приступљено 22. 2. 2012. „Динамички албедо неутрона”CS1 одржавање: Непрепознат језик (веза)
^ абJavier Gómez-Elvira. „Rover Environmental Monitoring Station (REMS)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 20. 07. 2011. г. Приступљено 23. 2. 2012. „Станица за праћење роверовог окружења”CS1 одржавање: Непрепознат језик (веза)
^ абв„Eyes and Other Senses” (на језику: (језик: енглески)). ЈПЛ. Приступљено 22. 2. 2012. „Очи ровера и друга чула”CS1 одржавање: Непрепознат језик (веза)
^„Launch Vehicle” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 24. 05. 2011. г. Приступљено 20. 2. 2012. „Детаљи о ракети носачу”CS1 одржавање: Непрепознат језик (веза)
^Amos, Jonathan (22. 7. 2011). „Mars rover aims for deep crater” (на језику: (језик: енглески)). BBC News. Приступљено 28. 2. 2012.CS1 одржавање: Непрепознат језик (веза)
^„MSL — Landing Sites Workshop” (Microsoft Word)|format= захтева |url= (помоћ). 15. 7. 2008.|contribution= игнорисан (помоћ)CS1 одржавање: Датум и година (веза)
^Grant, John & Golombek, Matt (12. 6. 2006). „MSL Workshop Summary”(pdf) (на језику: (језик: енглески)). Приступљено 1. 3. 2012.CS1 одржавање: Непрепознат језик (веза)
^„MSL Landing Site Selection”(pdf) (на језику: (језик: енглески)). Jet Propulsion Laboratory. Приступљено 1. 3. 2012. „Избор места за слетање”CS1 одржавање: Непрепознат језик (веза)
^Grant, John & Golombek, Matt (октобар 23 — October 25, 2007). „SECOND LANDING SITE WORKSHOP FOR THE 2009 MARS SCIENCE LABORATORY” (на језику: (језик: енглески)). nasa.gov. Приступљено 1. 3. 2012. „Друга радна група за избор места слетања”Проверите вредност парамет(а)ра за датум: |date= (помоћ)CS1 одржавање: Непрепознат језик (веза)
^„MSL Workshop Voting Chart”(pdf) (на језику: (језик: енглески)). Приступљено 1. 3. 2012. „Табела гласова”CS1 одржавање: Непрепознат језик (веза)
^„Site List Narrows For NASA's Next Mars Landing” (на језику: (језик: енглески)). marstoday.com. 19. 11. 2008. Архивирано из оригинала 27. 11. 2008. г. Приступљено 1. 3. 2012. „Сужен избор потенцијалних локација за слетање”CS1 одржавање: Непрепознат језик (веза)
^„Current MSL Landing Sites” (на језику: (језик: енглески)). Архивирано из оригинала 15. 3. 2012. г. Приступљено 1. 3. 2012. „Тренутан избор места за слетање”CS1 одржавање: Непрепознат језик (веза)
^„Final 7 Prospective Landing Sites” (на језику: (језик: енглески)). NASA. Архивирано из оригинала 13. 04. 2011. г. Приступљено 1. 3. 2012. „жизбор сужен на седам локација”CS1 одржавање: Непрепознат језик (веза)
^ абWebster, Guy; Brown, Dwayne (22. 7. 2011). „NASA's Next Mars Rover to Land at Gale Crater” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 07. 06. 2012. г. Приступљено 1. 3. 2012. „Изабрана локација за слетање”CS1 одржавање: Непрепознат језик (веза)
^ абAmos, Jonathan (22. 7. 2011). „Mars rover aims for deep crater” (на језику: (језик: енглески)). BBC News. Приступљено 1. 3. 2012. „Ровер циља велики кратер”CS1 одржавање: Непрепознат језик (веза)




 На слици се виде типови три генерације ровера који су послати на Марс.
На слици се виде типови три генерације ровера који су послати на Марс. Поређење точкова: Соџурнер, Марс експлорејшн ровери, Марсова научна лабораторија.
Поређење точкова: Соџурнер, Марс експлорејшн ровери, Марсова научна лабораторија. Ровер током тестова мобилности. На точковима се може видети шаблон ЈПЛ у Морзеовој азбуци.
Ровер током тестова мобилности. На точковима се може видети шаблон ЈПЛ у Морзеовој азбуци. Соба у којој се склапао ровер.
Соба у којој се склапао ровер. Тестирање преласка преко препрека.
Тестирање преласка преко препрека.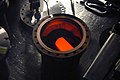 Пуњење ММРТГ-а марсове научне лабораторије.
Пуњење ММРТГ-а марсове научне лабораторије.







.jpg)

.jpg)
.jpg)

















.gif)

.gif)



.jpg)
























 Остаци исушеног речног корита на Марсу.
Остаци исушеног речног корита на Марсу.










_-_Flickr_-_NASA_Goddard_Photo_and_Video.jpg)


















